좌표계
참고
Coordinate System
좌표계에는 왼손 좌표계와 오른손 좌표계가 존재
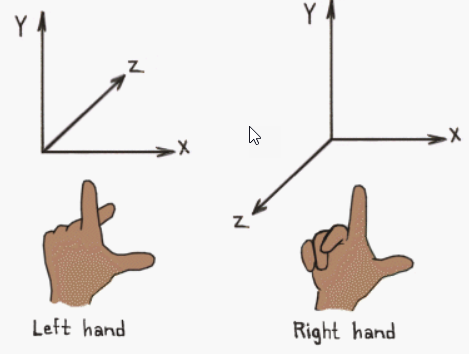
참고로 pytorch3D, OpenCV, OpenGL 모두 오른손 좌표계를 사용하나, Unity의 경우 왼손 좌표계를 사용
전체적인 좌표계의 관계는 다음과 같음
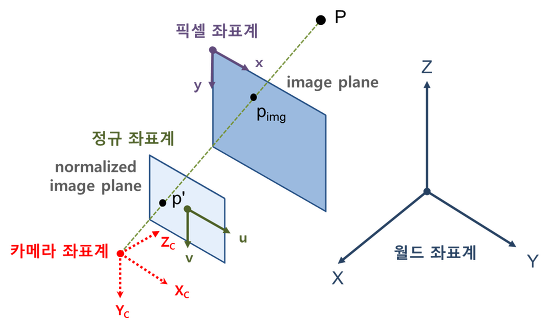
월드 좌표계 (World Coordinate System)
우리가 살고 있는 공간의 한 지점을 기준으로 한 좌표계
즉, 물체의 위치를 표현하기 위해 임의로 기준을 잡은 좌표계
방의 모서리 위치, 물체의 현재 위치 등 임의로 기준을 잡아서 사용
단위는 상관이 없으나, 월드 좌표계에서는 한 위치에 대한 표현이 하나로 정해져야 함
\(P=(X,Y,Z)\)
카메라 좌표계 (Camera Coordinate System)
카메라를 기준으로 한 좌표계
카메라의 초점(렌즈의 중심)을 원점, 광학축 방향을 Z축, 카메라의 아래쪽 방향을 Y, 오른쪽방향을 X축으로 잡음
월드 좌표계의 단위와 카메라 좌표계의 단위는 동일해야 함
이미지 좌표계 (Image Coordinate System)
픽셀 좌표계 (Pixel Image Coordinate System) 라고도 함
3D 공간상의 한 점 $P$는 카메라의 초점 (또는 렌즈의 초점)을 지나서 이미지 평면의 한 점 에 투영(projection)
원점은 이미지의 좌상단의 점이고 이미지의 해상도의 크기를 가짐
- 해상도는 카메라에 따라 다름
정규 이미지 좌표계 (Normalized Image Coordinate System)
카메라 내부 파라미터에 대한 영향을 제거한 이미지 좌표계
좌표계의 단위가 없는 정규화 된 좌표계이며 카메라 초점과의 거리가 1인 가상의 이미지 평면을 정의하는 좌표계
- 원점은 정규 이미지 평면의 중점(평면과
의 교점)