3D Transformation
참고
- NVIDIA Jetson Nano와 함께하는 SLAM의 이해와 구현
- Coordinate Transformations & Representations for Rotations
- 6. 회전의 수학 II : 사원수
- 축각 회전 (Axis-Angle Rotation) 또는 로드리게스 회전 (Rodrigues Rotation)
3D 변환
Computer vision 에서는 Euclidean transformation, 즉 rigid transformation에만 관심이 있음
rigid transformation을 적용해도 물체의 형태는 변하지 않고 회전, 이동 변환만 함
회전 표현법
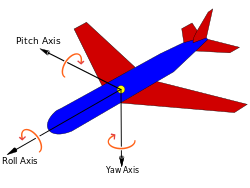
Euler Angle
3차원 공간상의 어떤 물체에 대한 회전 표현하기 위해 고정된 3차원의 직교 좌표계 사용하는 방법
이 때 각각의 고정된 축에 대해서 Roll, Pitch, Yaw 라는 3개의 파라미터로 회전을 표현 표현
각 축의 회전은 오른손 법칙을 따르기 때문에 반시계 방향이 +
각각 $x$축, $y$축, $z$축 에 대한 오일러각 $\alpha$, $\beta$, $\gamma$를 이용하여 회전 행렬을 얻으면 다음과 같이 표현 가능
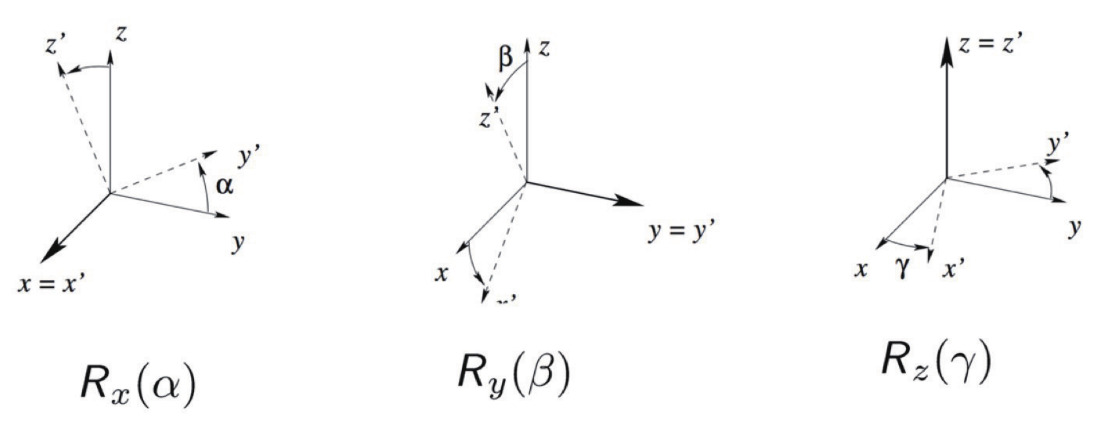
이렇게 얻어진 각각의 고정된 축에 대한 회전 행렬을 행렬 곱셈을 통해 하나로 합치면 3차원 강체 (Rigid-body)에 대한 임의의 회전 표현 가능
행렬 곱셈은 교환 법치기 성립하지 않기 때문에 축을 아래와 같이 어떤 순서로 하는지에 따라서 회전의 결과가 바뀌는 것을 주의
- 뒤의 행렬부터 계산
반대로 회전 행렬 $R$이 주어졌을 때 오일러 각으로 변환하는 것도 가능
$R_{A}$를 예를 들어 설명하면 다음과 같음
첫번째 column이 가장 간단하기 때문에 이를 기준으로 설명
$\beta$에 대한 $\sin$, $\cos$ 을 $r_{11}$, $r_{21}$, $r_{31}$ 로 표현 가능
이 때 분모에 따라서 경우를 나누어 생각해 볼 수 있음
$\pm \sqrt{r_{11}^{2}+r_{21}^{2}} !=0 $ 일 때,
$\pm \sqrt{r_{11}^{2}+r_{21}^{2}} > 0$ 이면 (즉, $\cos\beta > 0$) 제 1, 4분면에 위치하기 때문에 $-90^{\circ} <\beta < 90^{\circ}$ 범위에 존재
$\pm \sqrt{r_{11}^{2}+r_{21}^{2}} < 0$ 이면 ($\cos\beta < 0$) ,
$r_{31} < 0$ , 제 2 사분면에 위치하기 때문에 $90^{\circ} <\beta < 180^{\circ}$
$r_{31} > 0$, 제 3 사분면에 위치하기 때문에 $-180^{\circ} <\beta < -90^{\circ}$
이 경우에만 회전 행렬로 오일러 각 구하는 것이 가능
$\pm \sqrt{r_{11}^{2}+r_{21}^{2}}=0$ 인 경우 ($\cos\beta=0$)
$\beta=90^{\circ}$ 이거나 $\beta=-90^{\circ}$의 값을 가지는데,
$\beta=90^{\circ}$ 인 경우
\[\begin{bmatrix} 0 & -\sin\gamma \cos\alpha +\cos\gamma\sin\alpha& \sin\gamma\sin\alpha+\cos\gamma\cos\alpha \\ 0 & \cos\gamma\cos\alpha+\sin\gamma\sin\alpha & -\cos\gamma\sin\alpha+\sin\gamma\cos\alpha \\ -1 & 0 & 0 \end{bmatrix} \\ \begin{bmatrix} 0 & -\sin(\gamma-\alpha) & \cos(\gamma-\alpha) \\ 0 & \cos(\gamma-\alpha) & \sin(\gamma-\alpha) \\ -1 & 0 & 0 \end{bmatrix}\]이 때, Gimbal Lock 현상이 발생함
Gimbal Lock 현상이란 각 축에 대한 회전을 진행하다 두 개의 축이 겹치게 되어서 회전각이 소실되는 현상
자유도가 줄어들기 때문에 표현력이 떨어짐
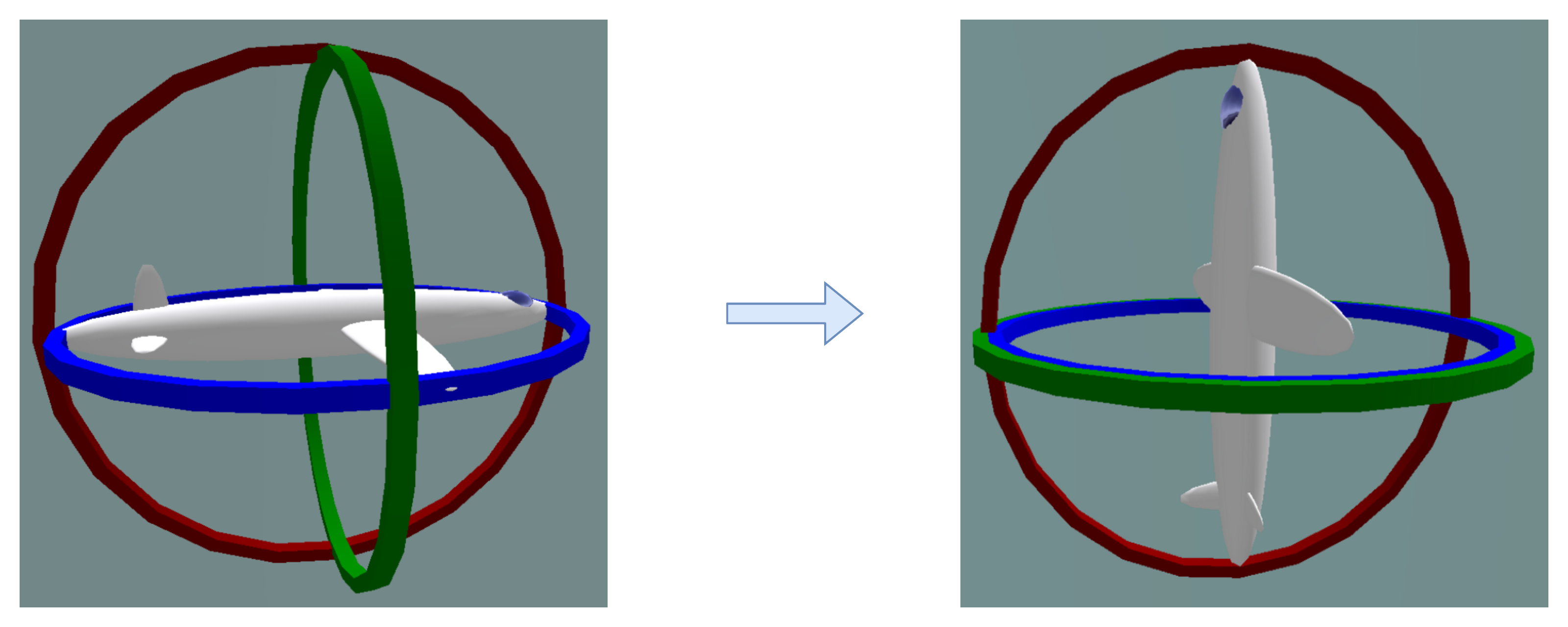
Gimbal Lock
- 자유도 하나가 사라져버려서 표현력이 떨어져버림
SO(3)
Special Orthogonal Matrix (3D) \(SO(3)=\{R\in \mathbb{R}^{3\times 3}|R^{T}R=I, \text{det}(R)=1\}\)
\[R_{x}=\begin{bmatrix} 1 & 0 & 0 \\ 0 & \cos{(\theta_{x})} & -\sin{(\theta_{x})}\\ 0 & \sin{(\theta_{x})} & \cos{(\theta_{x})}\end{bmatrix}\] \[R_{y}=\begin{bmatrix} \cos{(\theta_{y})} & 0 & \sin{(\theta_{y})} \\ 0 & 1 & 0\\ -\sin{(\theta_{y})} & 0 & \cos{(\theta_{y})}\end{bmatrix}\] \[R_{z}=\begin{bmatrix} \cos{(\theta_{z})} & -\sin{(\theta_{z})} & 0 \\ \sin{(\theta_{z})} & \cos{(\theta_{z})} & 0\\ 0 & 0 & 1\end{bmatrix}\]Quanternion (사원수)
3개의 허수(Complex number)와 하나의 실수 (Real Number)를 이용하여 회전을 표현하는 방법 \(\hat{q}=d+a\mathbf{i}+b\mathbf{j}+c\mathbf{k}=(d, (a,b, c))\)
Axis-Angle
3차원 공간에서 임의의 회전 축 하나를 벡터$\bar{n}$로 표현하고, 이 축에 대한 회전각 $\theta$를 이용해 회전을 표현하는 방법
로드리게스 회전이라고 하기도 함
(축각 방식 중 하나인지, 같은 말인지… )
로드리게스 회전의 공식은 아래은 순서로 유도할 수 있음
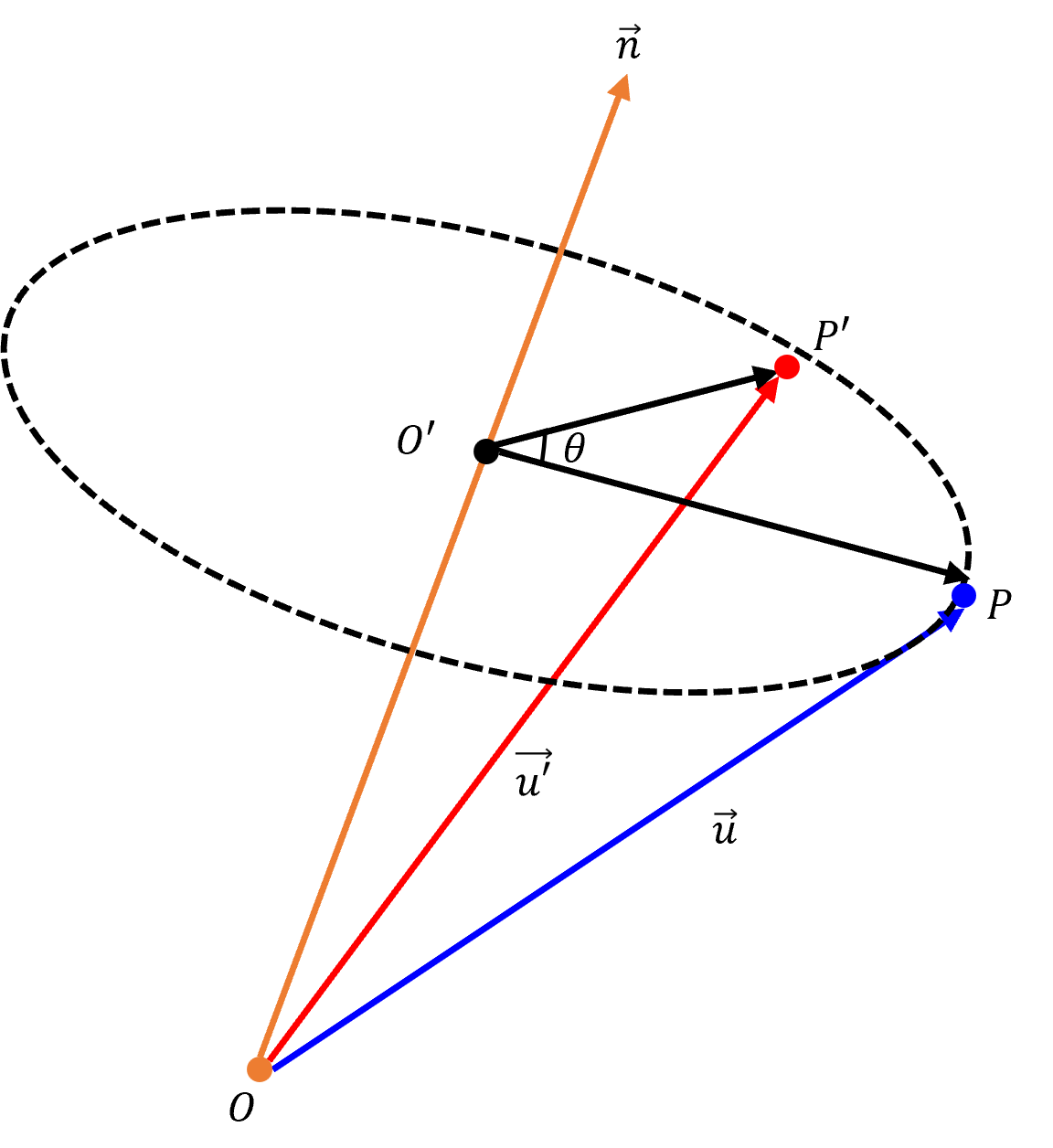
가장 먼저 원점 $O$에서 $O^{‘}$을 향하는 vector를 $v$라고 하고 이를 계산
\[\vec{v}=(\vec{u}\cdot\vec{n})\vec{n}\]- 벡터 내적을 이용하여 투영
위에 구한 값을 이용하여 \(\overrightarrow{O^{'}P}\) 계산
\[\overrightarrow{O^{'}P}=\vec{u}-\vec{v}\]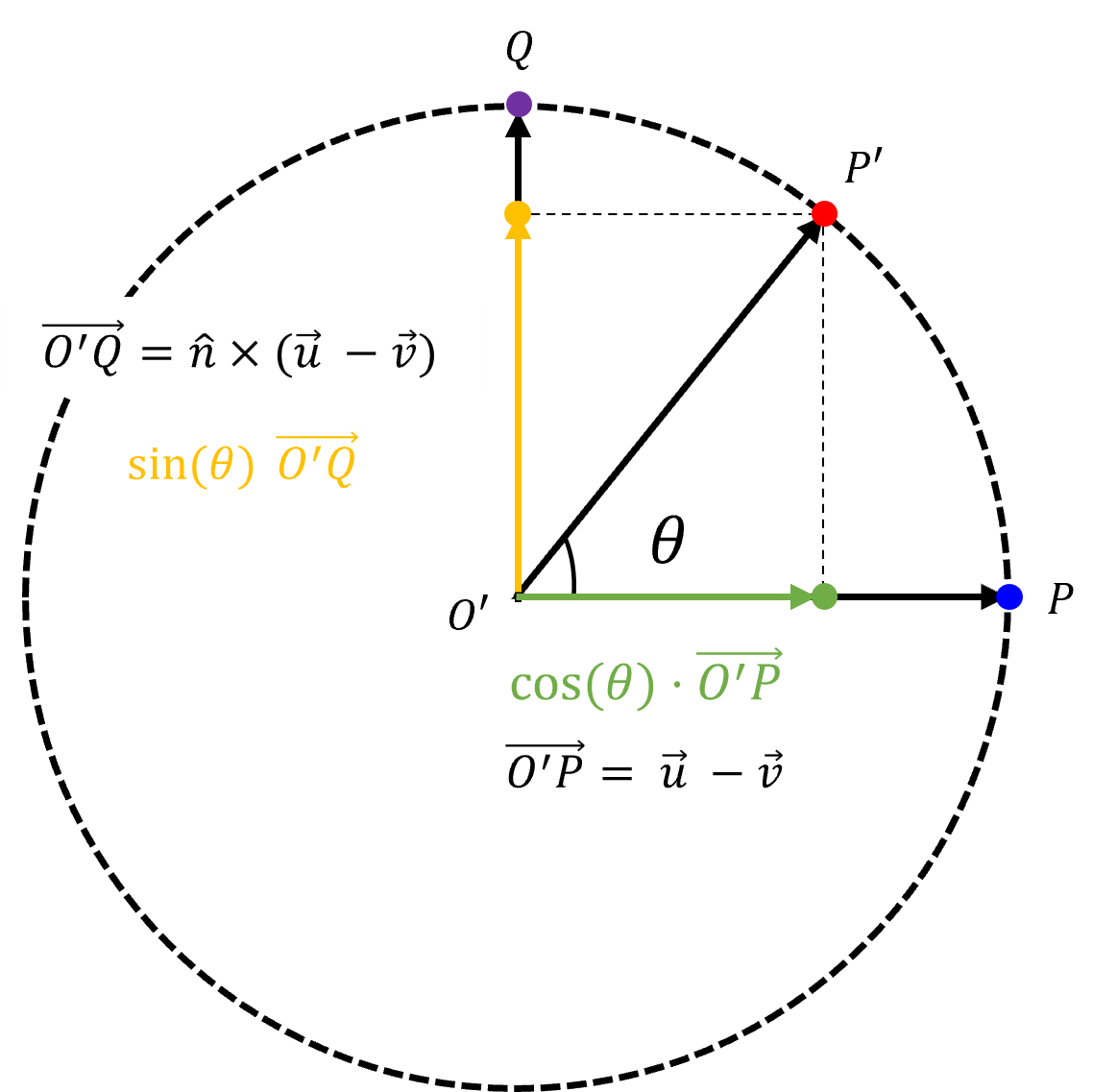
\(\overrightarrow{O^{'}P^{'}}\)의 \(\overrightarrow{O^{'}P}\) 방향으로의 vector 는
\[\cos\theta\ \overrightarrow{O^{'}P}\]\(\overrightarrow{O^{'}P}\)와 수직인 vector인 \(\overrightarrow{O^{'}Q}\) 계산
\[\overrightarrow{O^{'}Q}= \vec{n} \times (\vec{u} - \vec{v})\]- \(\overrightarrow{O^{'}P}\), $ \vec{n}$ 두 벡터와 모두 수직인 벡터이기 때문에 외적을 사용하여 계산 가능
\(\overrightarrow{O^{'}P^{'}}\)의 \(\overrightarrow{O^{'}Q}\) 방향으로의 vector는
\[\sin{\theta}\ \overrightarrow{O'Q}\]두 벡터의 합으로 \(\overrightarrow{O'P'}\) 계산
\[\begin{align*} \overrightarrow{O'P'} &= \cos{\theta} \ \overrightarrow{O'P} + \sin{\theta}\ \overrightarrow{O'Q} \\ &= \cos{\theta} (\vec{u} - \vec{v}) + \sin{\theta} (\bar{n} \times (\vec{u} - \vec{v})) \\ &= \cos{(\theta)} (\vec{u} - \vec{v}) + \sin{\theta} (\hat{n} \times \vec{u} - \bar{n} \times \vec{v}) \\ &= \cos{\theta} (\vec{u} - \vec{v}) + \sin{\theta} (\bar{n} \times \vec{u}) \end{align*}\]지금까지 구한 값을 이용하여 \(\overrightarrow{OP'}\) 아래와 같은 식으로 구할 수 있음
\[\begin{align*} \overrightarrow{OP'} &= \vec{v} + \cos{\theta} (\vec{u} - \vec{v}) + \sin{\theta} (\bar{n} \times \vec{u})\\ &=\bar{u}\cdot \bar{n}+\cos{\theta} (\vec{u} - \bar{u}\cdot \bar{n}) + \sin{\theta} (\bar{n} \times \vec{u}) \end{align*}\]- 내적과 외적으로 계산 가능
Quanternion (사원수)
3개의 허수(Complex number)와 하나의 실수 (Real Number)를 이용하여 회전을 표현하는 방법 \(\hat{q}=d+a\mathbf{i}+b\mathbf{j}+c\mathbf{k}=(d, (a,b, c))\)